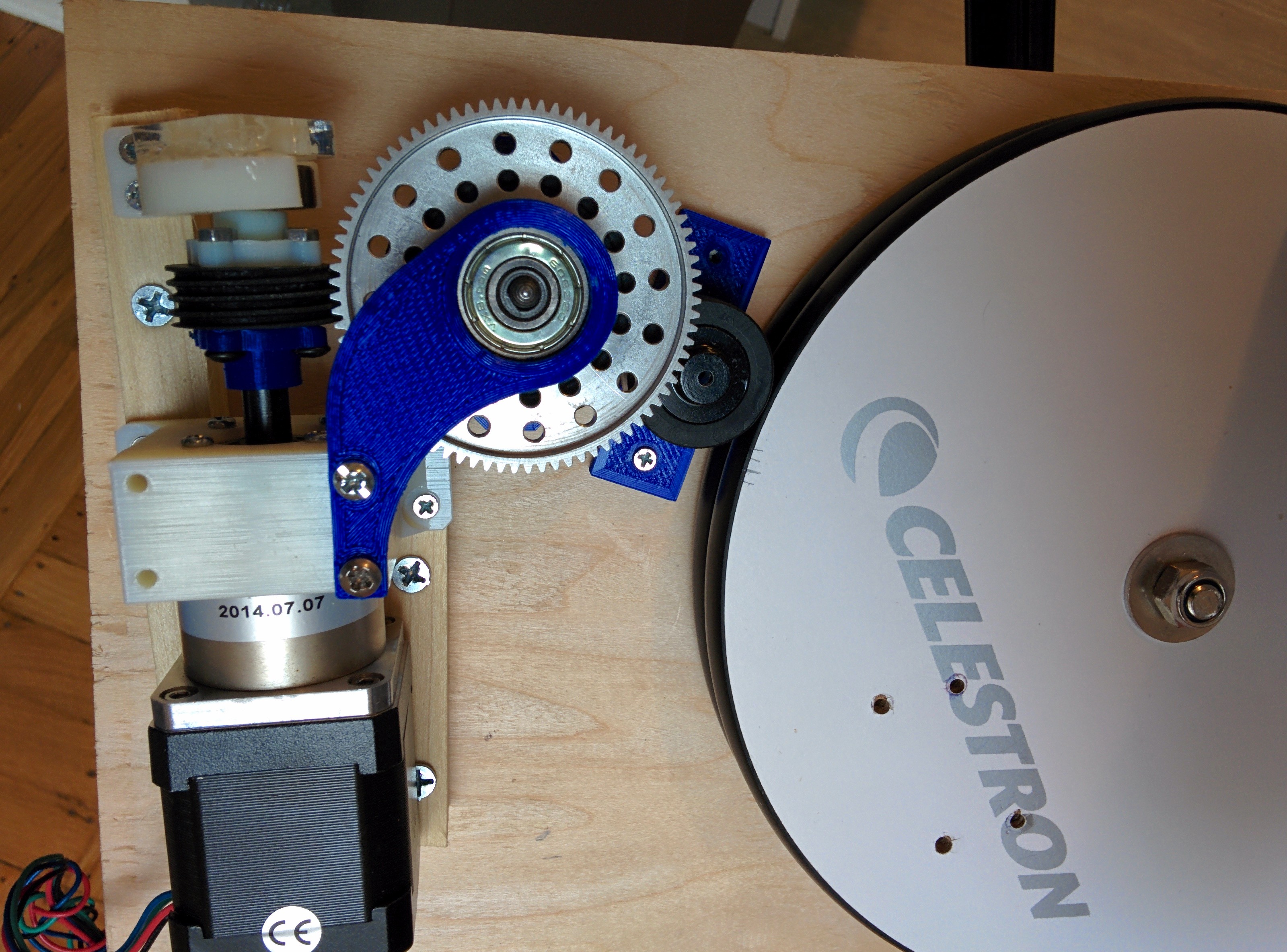
3D Printed worm gears and mounts for my automated telescope project =D
Originally shared by Sameer Ansari (Sam)
Got it working! Sidereal tracking using Nema 17 motors and a big gear train.
Tech used:
- 3D Printed mounts and worm
- Arduino + stepper drivers for driving the system
- Raspberry pi + pi noir camera to take photos
- Cellphone mount, though haven’t been able to control exposure on that as well yet.
Gear ratio calculations:
- Nema 17 motor (200 steps per revolution)
- 100:1 Planetary gear ratio on motor
- 80:1 Worm gear (80 tooth gear)
- ~4:1 Friction wheel setup
- Stepper running at full step here
At full steps gear ratio is ~ 20010080*4 = 6,400,000:1 or ~0.2 arc seconds per step, where the earth’s sidereal rate is roughly 15 arc seconds per second. There’s a ton of slop due to the backlash of the worm and the rubber in the friction wheels, but once it’s moving it’s consistent.